Термін позиціонування та історія
Щоб допомогти вам зрозуміти, як працює внутрішнє позиціонування, ми хотіли б дати вам короткий екскурс в історію, а також визначити деякі основні терміни. Перш ніж звернутися до питання внутрішнього позиціонування, важливо зрозуміти, як працює зовнішнє позиціонування. В принципі, є два способи з'ясувати положення: обчислити точне положення в даний момент часу (це називається абсолютним позиціонуванням) і інший підхід до отримання положення полягає в обчисленні швидкості і напрямку від останньої відомої точки відправлення (це називається відносним позиціонуванням, або Числення координат).
Абсолютне позиціонування: оскільки Земля є сферичним об'єктом, інформація складається з сферичних координат, що складаються з двох кутів, званих широтою і довготою, і відстані, званою висотою.
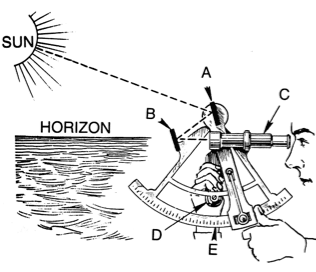
Протягом століть визначення місця розташування було важким завданням для навігаторів; це вимагало часу, і розрахункове положення було досить приблизним. Вони повинні були використовувати секстант для вимірювання широти (кут між горизонтом і Сонцем опівдні) і точний годинник для визначення довготи (кутовий зсув від грінвічського меридіана). Крім того, ці методи можуть бути використані тільки при хороших погодних умовах і в певний час доби.
Починаючи з 70-х років для військових і 80-х років для цивільних осіб з'явилася нова технологія під назвою GPS (Global Positioning System). GPS використовує 32-супутникове сузір'я, для якого відомо точне положення. У кожен супутник вбудовані дуже точні і синхронізовані атомні годинники. Він передає унікальний радіохвильовий сигнал, який включає в себе мітку часу годинника. Будь-який GPS-сумісний пристрій на Землі може одночасно приймати сигнали від декількох супутників. Оскільки радіохвилі поширюються з відомою швидкістю, пристрої приймають сигнали з різними часовими мітками, що надходять від декількох супутників. Таким чином, можна обчислити відстані між кожним супутником і приймачем.
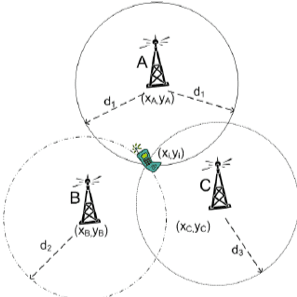
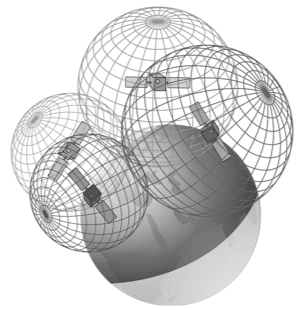
Після визначення відстаней між супутниками і пристроєм для обчислення поточного положення використовується алгоритм, званий Трилатерацією. Трилатерація дозволяє визначати положення з 3 відомих відстаней на площині або 4 відомих відстаней на сфері. Цей алгоритм дуже важливий, так як він використовується майже у всіх технологіях позиціонування, будь то в приміщенні або на відкритому повітрі. Трилатерацію не слід плутати з тріангуляцією, яка є алгоритмом, використовуваним геодезистами для обчислення позицій з використанням кутів замість відстаней.
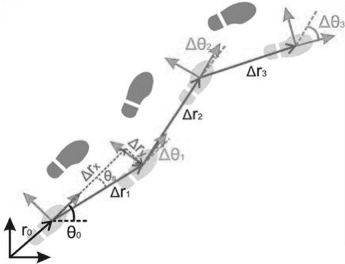
Відносне позиціонування або Числення координат: цей метод зазвичай опирається на обладнання, яке називається інерційним вимірювальним блоком (IMU), яке використовує кілька гіроскопів і акселерометрів для обчислення пройденої відстані. IMU використовуються в більшості ситуацій, коли потрібно безперервне точне положення: кораблі, літаки, космічні ракети, ракети і автомобілі.
Як щодо внутрішнього позиціонування?
Внутрішнє позиціонування-це дуже складне питання, так як звичайні зовнішні технології не працюють всередині будівель. GPS-хвилі не можуть належним чином досягти приймачів через стіни та дахи, що призводить до значної втрати точності, яка може досягати декількох десятків метрів. Більш того, GPS абсолютно не здатний обчислити, на якому поверсі знаходиться приймач, не згадавши, що під землею взагалі не приймається ніякого сигналу. Класичне числення координат також практично неможливо використовувати в приміщенні через розмір інерціальної одиниці виміру (IMU). Існує прямий зв'язок між розміром IMU і його точністю: чим менше IMU, тим менша точність. Оскільки більшість внутрішніх випадків використання включають людей зі смартфонами, альтернатива класичним IMU, які занадто великі, щоб бути вбудованими в смартфони, дуже необхідна.
Технології позиціонування всередині приміщень відносяться до чотирьох основних категорій: близькість, трилатерація, дактилоскопі́я і рух. Деякі з цих технологій можуть використовуватися окремо, але також можуть бути об'єднані для забезпечення більшої точності.Безконтактне позиціонування засноване або на прямому контакті, або на близькості між приймачем і пристроєм. У більшості випадків він використовується на стороні клієнта, за винятком Wi-Fi, який має можливості виявлення на стороні сервера. Ось деякі можливі технології:
- QR-коди / NFC-мітки, які можуть бути прочитані камерами смартфонів або зчитувачами NFC. Наклейки QR-коду / NFC прив'язуються до точного місця розташування в будівлі.
- Bluetooth Low Energy (BLE) девайси або beacons. Маяк посилає сигнал, який можна прочитати, коли смартфон знаходиться в зоні випромінювання. Чим більше розгорнутих маяків, тим точніше позиція. Потім положення користувача зв'язується з місцем розташування пристрою BLE з найсильнішим сигналом.
- Visible Light Communication (VLC) девайси або Li-Fi. Світлодіодна лампа посилає невидимий сигнал, який може бути прочитаний камерами смартфонів або спеціальними приймачами. Оскільки кожна лампа має унікальний ідентифікатор, який можна прочитати тільки прямо під лампою, це дозволяє легко забезпечити точне положення.
- Точки доступу Wi-Fi можна використовувати для визначення місця розташування смартфона або будь-якого іншого пристрою з підтримкою Wi-Fi. Позиція користувача визначається так само, як і для BLE девайсів.
- Ультразвукові пристрої зазвичай встановлюються поверх існуючих аудіосистем всередині магазинів або торгових центрів. Знову розташування пам'яток працює точно так же, як BLE і точки доступу Wi-Fi.
Трилатераційне позиціонування використовує відстані між декількома випромінювачами і приймачем для обчислення положення останнього. Відстані визначаються за допомогою RSSI або за допомогою алгоритмів tof. RSSI розшифровується як відносна індикація рівня прийнятого сигналу. Він дозволяє обчислювати відстань на основі загасання радіохвиль. Тут обчислення відстаней не вимагає складного обчислення, але точність низька через чутливість до перешкод, таких як стіни, двері або навіть люди! Час польоту або ToF - це метод, який вимірює відстань між випромінювачем і пристроєм, заснований на різниці в часі між випромінюванням сигналу і його поверненням до відправника. На відміну від RSSI, ToF включає в себе круговий зв'язок і складну обробку сигналів, що вимагає спеціальних чіпсетів. Це досягається як з кращою точністю, так і з більш високою вартістю. Ось технології, що використовують трилатерацию:
- Bluetooth Low Energy (BLE) і ультразвук, хоча вони і є безконтактними технологіями, все ж можуть бути використані для забезпечення позиціонування на основі трилатерації. Відстані обчислюються на стороні клієнта за допомогою RSSI.
- Wi-Fi може використовувати трилатерацію або на стороні клієнта (Тільки для Android), або на стороні сервера. Останнє є набагато більш точним, але такі послуги визначення місця розташування доступні тільки на преміальному обладнанні Wi-Fi (наприклад, Cisco CMX, Cisco Meraki). Відстані зазвичай обчислюються за допомогою RSSI, але розширення стандарту 802.11 забезпечить підтримку ToF в найближчому майбутньому.
- Надширокосмуговий діапазон-це ще одна нова технологія, яка забезпечує дуже точне позиціонування завдяки використанню ToF для обчислення відстаней між приймачем і випромінювачами. Тим не менш, ця технологія має ряд недоліків: відсутність стандартизації, що призводить до відсутності доступних смартфонів і високої вартості.
Дактилоскопі́я використовує вимірювання сигналів в різних будівлях для обчислення свого місця розташування. Він заснований на припущенні, що для кожної позиції існує майже унікальний сигнал, який може бути записаний. Потім стає можливим порівняти отримані сигнали з існуючими записами, щоб з'ясувати поточну позицію. Однак у дактилоскопії є і зворотна сторона. По-перше, він працює тільки в русі, а по-друге, він вимагає стабільних сигналів з плином часу. Цей метод може бути використаний як самостійно, так і для підвищення точності інших технологій позиціонування (зазвичай заснованих на трилатерації). Крім того, можна одночасно комбінувати відбитки пальців з декількох джерел для підвищення точності. Ось список технологій, які можуть скористатися перевагами дактилоскопії:
- Bluetooth Low Energy (BLE)дактилоскопія працює дуже добре, тому що вона може бути виконана на стороні клієнта і тому що сигнали BLE виявляються стабільними з плином часу.
- Wi-Fi дактилоскопія працює так само добре, як і BLE, за винятком того, що він не може бути використаний на пристроях iOS через обмеження Apple. Саме тому він використовується тільки для Android-смартфонів і спеціальних пристроїв стеження, використовуваних розвідувальними і правоохоронними органами для обходу глушників GPS.
- Дактилоскопія магнітного поля використовує унікальні варіації магнітного поля Землі, викликані сталевими деталями всередині будівельних конструкцій. Мабуть, він працює досить добре, але з часом виявляється нестійким через безліч факторів (варіації поля Землі, переміщення обладнання і т.д.).
- Фото дактилоскопія заснована на аналізі зображення інтер'єру будівлі. Це добре працює, коли існують значні відмінності між підлогами, включаючи меблі. Він не є стабільним з плином часу, за винятком тих випадків, коли дактилоскопія надходить з постійних камер високої роздільної здатності, яка може часто оновлювати записи.
Позиціонування руху всередині і зовні будівель працює за одними і тими ж принципами, але з використанням різних технологій. Оскільки неможливо використовувати традиційні IMU, датчики смартфонів використовуються для виявленної та кількісної оцінки рухів. Ось список датчиків, які ви можете знайти в більшості смартфонів: компас, акселерометри, барометри, крокоміри. Алгоритми, такі як Kalman filters обробляють дані, що надходять від цих датчиків, щоб обчислити відносний рух. Проблема з цими методами полягає в низькій точності, що виникає через невеликі розміри датчиків і кумулятивних помилок. Само собою зрозуміло, що рівень точності набагато нижче, ніж це було б з IMUs. Що стосується дактилоскопії, то позиціонування руху найкраще використовувати для збільшення позиціонування трилатерації, а не як автономну технологію.
В наші дні: Blue Dot jumping та спосіб її виправлення
In-door позиціонування та пошук шляхів в даний час стають все більш популярними для практичного використання в торгових центрах, лікарнях, аеропортах та інших громадських будівлях, складських приміщеннях і кампусах. Кілька компаній працюють над розробкою SDK для внутрішнього розміщення і пропонують різні моделі інтеграції клієнтських додатків. Всі вони стикаються з аналогічними проблемами, тобто “Blue Dot jumping”. Blue Dot це загальноприйнятий термін для позначення маркера на карті, що показує поточне місце розташування користувача. Jumping це ефект" стрибків " маркера розташування в неправильному/ правильному місці розташування, в основному відбувається, якщо використовується тільки розрахунок місця розташування на основі BLE: стрибки відбуваються через нестабільне випромінювання сигналу і істотно не корелюють з використовуваним алгоритмом визначення місця розташування (тріангуляція becons, співвідношення більшої сили сигналу і т.д.). Існує кілька методів, що використовуються для усунення цього ефекту. Перший заснований на використанні датчиків пристроїв для алгоритмів, подібних зовнішньому 'численню координат". Ідея полягає в тому, що місце розташування користувача, отримане за допомогою BLE beacons, "коригується" вектором зміни місця розташування пристрою, отриманим від датчиків. Досить вражаючу демонстрацію відстеження руху користувача за допомогою датчиків можна побачити тільки в продукті Navisens. Наша команда включає в себе знання про те, як запобігти Blue Dot Jumping за допомогою техніки, натхненної Navisens, і деяких методів згладжування.
Багатообіцяючі результати для фіксації стрибків синіх точок також отримані з використанням методів машинного навчання з класифікатором машинного навчання з поділом фільтрів (FPMLC). Останнім часом ми зосередилися на вивченні цих методів і можливостей, які вони відкривають для даної області.
Майбутне In-door позиціонування
Apple анонсувала чіп U1 з поліпшеним UWB на борту для iPhone 11 і iPhone 11 Pro. UWB - це протокол бездротового зв'язку ближньої дії, який, подібно Bluetooth або Wi-Fi, використовує радіохвилі. Але він істотно відрізняється тим, що працює на дуже високій частоті. Як випливає з його назви, він також використовує широкий спектр в кілька ГГц. Один із способів думати про це - радар, який може безперервно сканувати всю кімнату і точно фіксувати об'єкт, як лазерний промінь, щоб виявити його місце розташування і передати дані. На початку 2000-х років UWB отримала обмежене застосування у військових радарах і прихованого зв'язку і коротко використовувалася в якості форми медичної візуалізації, такої як системи дистанційного моніторингу серця. Його прийняття запізнювалося до недавнього часу, коли комерційні інтереси почали вивчати потенційні види використання.
В даний час системи UWB можуть забезпечити точне внутрішнє позиціонування +/- 30 см з оновленням позиціонування кожні 50 мс. Величезне поліпшення в порівнянні з точністю, що забезпечується системами на базі Wi-Fi або Bluetooth.
Список Android, що підтримують UWB аналогічно недавнім iPhone 11, потрібно перевіряти, але ми можемо бути впевнені, що топові виробники, такі як Samsung, Huawei, Xiaomi та інші, підуть за прикладом Apple і при здоровій конкуренції внутрішнє позиціонування буде значно покращено протягом декількох наступних років.
Висновок
Внутрішнє позиціонування-це дуже складне питання, яке не може бути вирішене за допомогою унікальної технології, як це робить GPS на відкритому повітрі. Найкращі постачальники покладаються на підхід, який називається злиттям датчиків, який базується на використанні комбінації технологій для забезпечення найкращої точності. Більшу частину часу вони використовують Трилатерацію для отримання абсолютного положення, іноді в поєднанні з відбитками пальців для підвищення точності. Потім вони використовують позиціонування руху, щоб перемістити Blue Dot, поки у них не буде достатньо варіації радіосигналу, щоб обчислити інше абсолютне положення. Таким чином, вони можуть заощадити батареї смартфонів, так як агресивне сканування радіосигналів (будь то BLE або Wi-Fi) пов'язане з високими витратами енергії. Безконтактне позиціонування-це одночасно і недорогий, і низькотехнологічний спосіб отримання позиції. Навіть якщо він дуже простий, він може бути достатнім в залежності від контексту, тому що не кожен проект дійсно потребує високої точності; не кажучи вже про бюджет, який вам потрібен, щоб отримати його. Нарешті, нинішня тенденція в розміщенні всередині приміщень полягає в повторному використанні існуючих інфраструктур замість розгортання нових, що обмежує загальні витрати. Наприклад, точки доступу Wi-Fi можна використовувати як для забезпечення доступу в інтернет, так і для внутрішнього позиціонування, тим більше що більшість з них тепер мають всередині себе чіпсети BLE. Те ж саме відбувається і з лампами Li-Fi, які можуть вбудовувати чіпсети BLE і різні датчики.
Ключові моменти для запам'ятовування
- Чисті технології позиціонування забезпечують абсолютне або відносне положення. Кілька методів можуть бути об'єднані для досягнення найкращих результатів у кожному конкретному випадку бізнесу.
- У приміщенні технологія GPS не працює належним чином через недостатню точність.
- Більшість провайдерів покладаються на ослаблення сигналу поряд з трилатерацією для обчислення своєї позиції.
- Дактилоскопія і позиціонування руху найкраще використовувати для підвищення точності інших внутрішніх систем позиціонування.
- Кращі постачальники покладаються на об'єднання датчиків, що означає, що вони використовують кілька технологій для забезпечення кращої точності.
Читайте більше
https://locatify.com/blog/what-is-the-new-apple-u1-chip-and-why-is-it-important/
https://www.computerworld.com/article/3490037/ultra-wideband-explained-and-why-its-in-the-iphone-11.html
https://www.mapwize.io/posts/how-indoor-positioning-works.html
https://www.macobserver.com/link/android-devices-to-get-ultra-wideband-tech-like-iphone-11/
https://towardsdatascience.com/kalman-filter-an-algorithm-for-making-sense-from-the-insights-of-various-sensors-fused-together-ddf67597f35e
https://www.navisens.com/
https://www.researchgate.net/publication/307849839_Enhancing_indoor_positioning_based_on ...